


29/05/19 upsud_C-07_2019 0 0
Etude de la dynamique d’un pendule simple magnétique, comportement chaotique.
Réalisation Margaux Khalil (École Estienne), Julien Bobroff et Frédéric Bouquet (Laboratoire de Physique des solides, Université Paris-Sud et CNRS). Toutes les informations et les autres projets sur opentp.fr

 Niveau : Moyen
Niveau : Moyen
 2 jours
2 jours
Acquisition du mouvement d'un pendule avec un accéléromètre arduino et étude de la dynamique.
Principe physique
Le comportement du pendule simple magnétique amorti est chaotique déterministe, c’est à dire qu’il présente une grande sensibilité aux conditions initiales. En effet, pour 2 conditions initiales aussi proche que l’on veut, l’évolution et l’état final du système sont très différents.
Il convient alors de disposer d’un protocole expérimental pouvant être répété un très grand nombre de fois pour étudier complètement l’ensemble des trajectoires que peut emprunter le système au comportement chaotique.
-
 Arduino
Arduino
-
 Fils connecteurs
Fils connecteurs
-
 Accéléromètre
Accéléromètre
-
 Bricolage général
Bricolage général
-
 Tige, plaque metalliques
Tige, plaque metalliques
-
 Aimants
Aimants
Matériel
Prévoir des fils assez souples pour ne pas entraver le mouvement de l’accéléromètre.
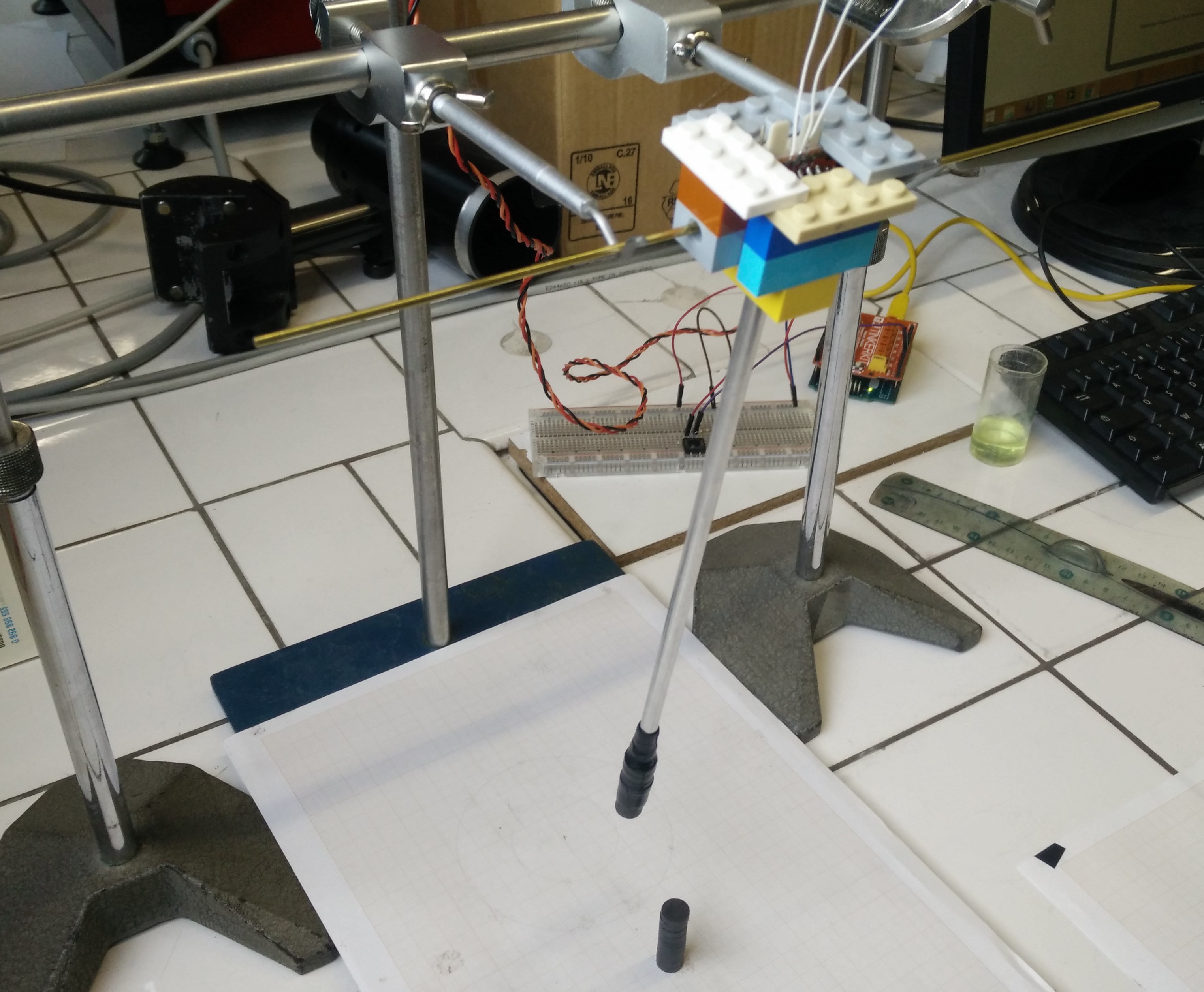
Montage du pendule
Fixer les aimants à un bout de la tige (faites en sorte que l’essentiel de la masse du pendule se trouve à cet endroit).
Fixer l’accéléromètre à l’autre bout de la tige, de sorte à ce que l’axe de l’accéléromètre soit dans le plan des oscillations du pendule et que le capteur soit l’endroit exact du pivot du pendule.
NB : plus le capteur est proche du point pivot, plus l’accélération due au mouvement accéléré de la tige est négligeable face à l’accélération de pesanteur, voire même nulle quand le capteur est confondu avec le pivot. Ce qui nous permettra de récupérer précisément l’inclinaison de la tige.
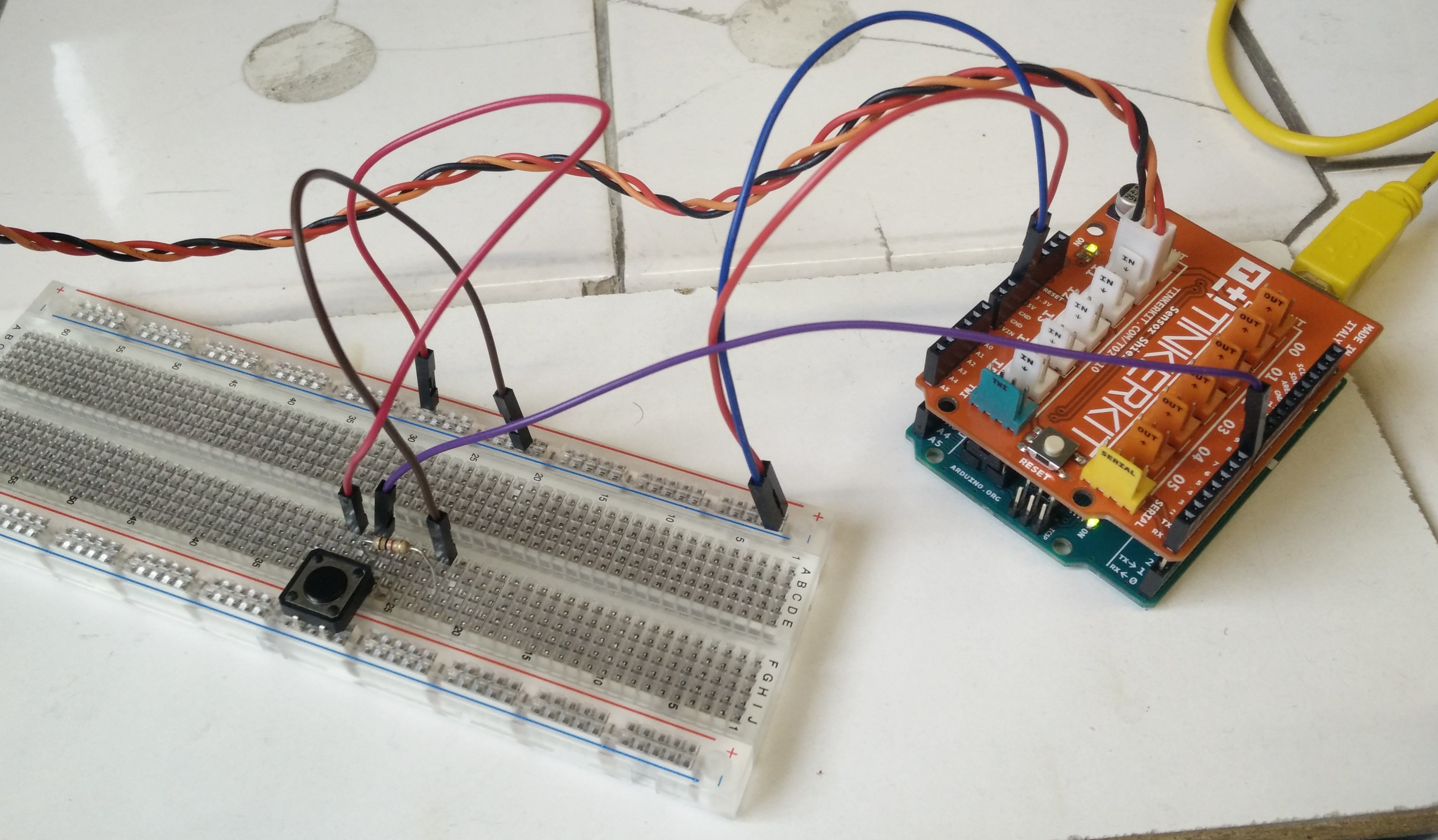
Interface Arduino avec un poste informatique
Brancher l’accéléromètre sur une entrée analogique de la carte Arduino.
Rappel : il faudra veiller à ce que les branchements n’entravent pas les oscillations du pendule.
On pourra aussi ajouter un bouton à la carte Arduino pour le calibrage de l’accéléromètre et le lancement et l’arrêt des acquisitions de données.
Programmer la carte Arduino pour calibrer votre capteur (setup), et acquérir les données de l’accéléromètre (loop) pour les envoyer à votre poste informatique où vous pourrez traiter les données ainsi acquises.

Traitement des données
L’accéléromètre renvoie la norme de l’accélération de pesanteur projetée sur l’axe du capteur utilisé. Utiliser les données du capteur et le calibrage effectué au préalable pour calculer l’angle d’inclinaison du pendule au cours de l’aquisition.
Dériver numériquement le signal obtenu afin de récupérer la vitesse angulaire du pendule.
A partir des variations de l’angle et de la vitesse angulaire au cours du temps, tracer les graphes qui permettront l’étude de la dynamique du système (variation de l’angle, de la vitesse angulaire, trajectoire du pendule au cours du temps, portraits de phase, etc..)
Remarque : il est conseillé de traiter le signal obtenu du capteur. Il sera bon de l’amplifier de sorte à augmenter la résolution angulaire de l’accéléromètre, ajouter des valeurs intermédiaires par interpolation pour augmenter la résolution temporelle de la Arduino, lisser le signal pour réduire son bruit.
(Ci-contre, un exemple de traitement des données)

Etude du système
Répéter les acquisitions de sorte à explorer les trajectoires que le système peut emprunter.
Tester la sensibilité aux conditions initiales.
Pour une étude encore plus complète du système, faire varier un paramètre d’étude, par exemple la distance entre le pendule magnétique et un aimant répulsif placé à sa verticale, pour varier la contribution de la force magnétique dans l’équation du mouvement du pendule.
Conclure.

Commentaires