


16/04/19 ASL Sapienza 0 0
Moto armonico
Margaux Khalil (École Estienne), Julien Bobroff, Frédéric Bouquet (Laboratoire de Physique des solides, Université Paris-Sud and CNRS) opentp.fr/it

 Livello : Facile
Livello : Facile
 2 giorni
2 giorni
L'obiettivo dell'esperimento è visualizzare la relazione tra moto circolare uniforme e moto armonico.

La Fisica
Il moto armonico ha legge oraria x=Asenωt dove x è definita elongazione. A, che è l’elongazione massima è definita “ampiezza”, e ω=2π/T è definita “pulsazione”.
Il moto armonico è dato dalla proiezione sul diametro delle posizioni di un punto che si muove di moto circolare uniforme.
Infatti, come illustrato, mentre il punto materiale P si muove di moto uniforme con velocità v e periodo T sulla circonferenza di raggio A, il punto M, che è la sua proiezione sul diametro x, esegue un moto oscillatorio semplice o “moto armonico”.
-
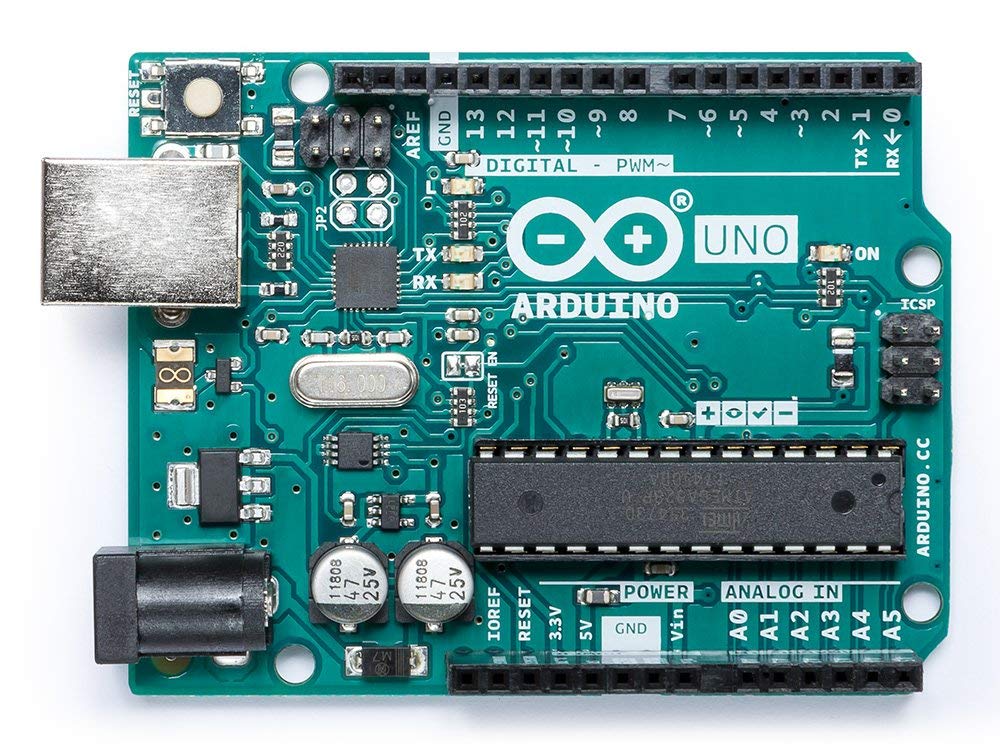 Scheda Arduino 1
Scheda Arduino 1
-
 Sensore ad ultrasuoni HCSR0S4
Sensore ad ultrasuoni HCSR0S4
-
 Cavetti di collegamento
Cavetti di collegamento
-
 Grattugia con manovella
Grattugia con manovella
-
 Forbici
Forbici
-
 Striscia di velcro biadesiva (circa 1 metro)
Striscia di velcro biadesiva (circa 1 metro)
-
 Schermo verticale in compensato
Schermo verticale in compensato
-
 PC
PC
Materiali
- Scheda Arduino 1
- Sensore ad ultrasuoni HCSR0S4
- Cavetti di collegamento
- Grattugia con manovella
- Forbici
- Striscia di velcro biadesiva (circa 1 metro)
- Striscia di panno(3 cm x 20 cm circa)
- Schermo verticale in compensato
- PC

PASSO 1: preparazione e supporto
Utilizzando il lato morbido della striscia di velcro, prepara un’impugnatura ad “anello” in cui inserire la mano fino alla terza falange (resta fuori il pollice) ed un “bracciale a striscia” da fissare al polso (puoi renderlo più confortevole fissando il velcro su una striscia di panno).
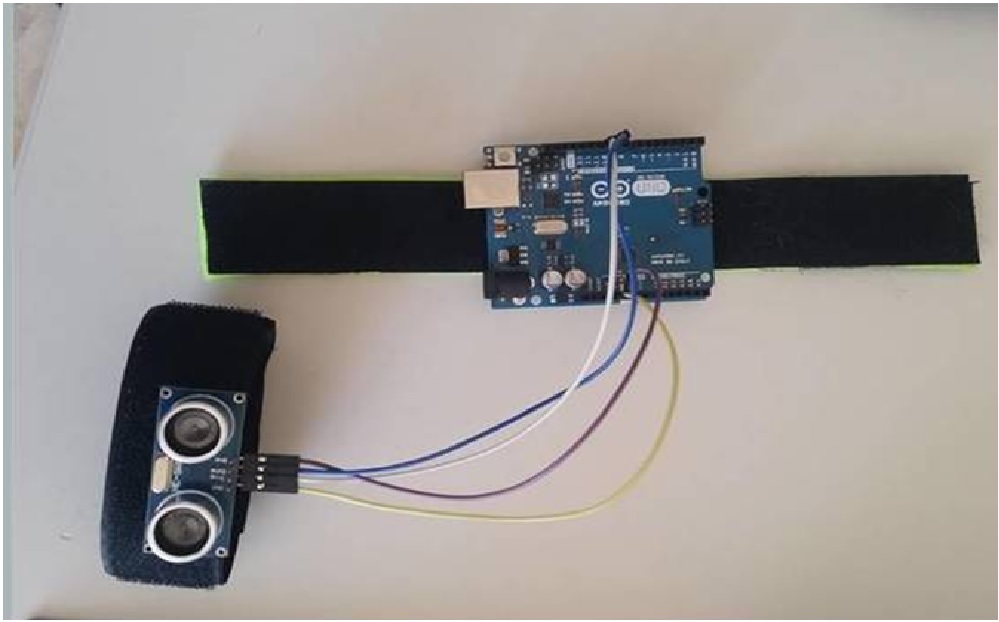
PASSO 2: fissaggio sensore
Attacca il velcro sul retro del sensore e della scheda Arduino 1.
Fissa sia il sensore che la scheda Arduino ai rispettivi supporti che hai preparato (“anello” e “bracciale a striscia”).
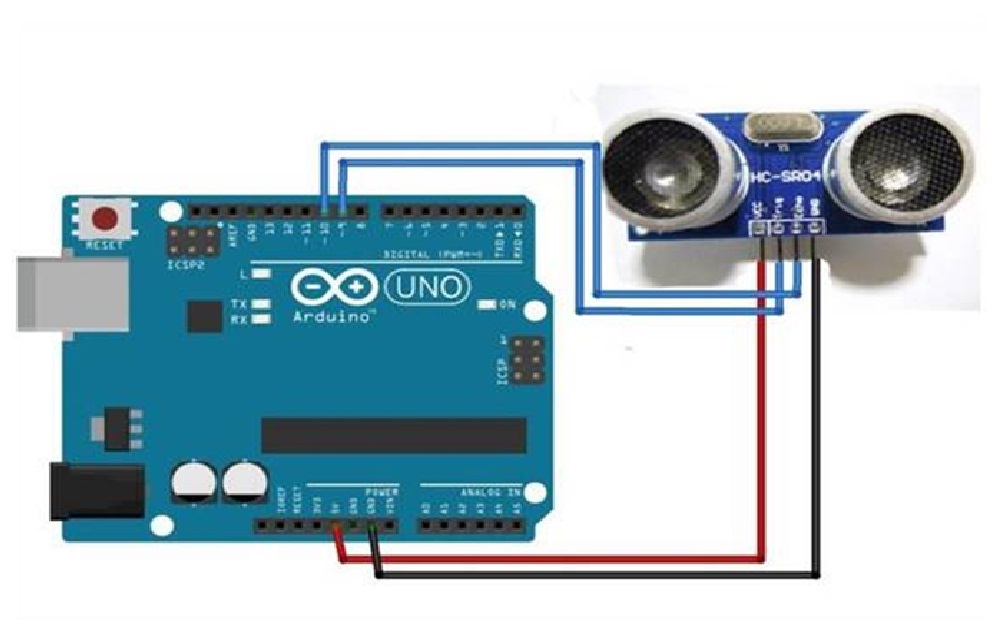
PASSO 3: collegamento sensore
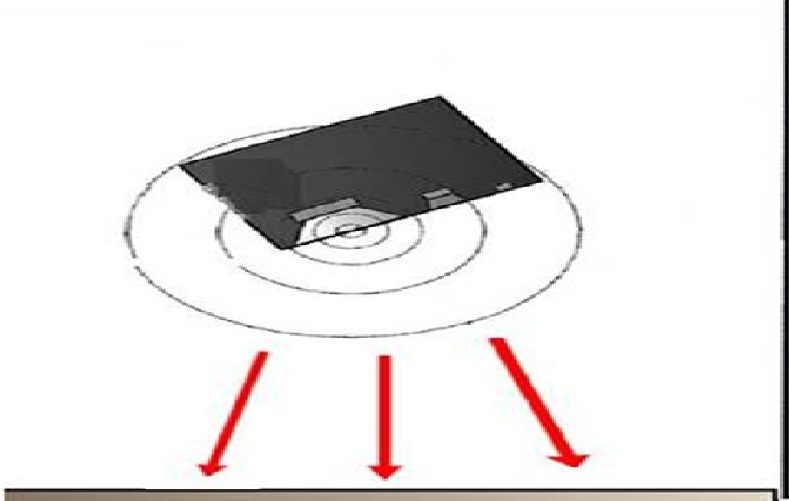
Collegare i 2 pin di alimentazione rispettivamente a Vcc e GND e gli altri 2 pin (Trigger e Echo) a 2 ingressi digitali.
PASSO 4: programmazione Arduino
Programmare la scheda Arduino in modo da misurare il tempo impiegato dal segnale sonoro emesso dal sensore ad arrivare sullo schermo e a tornare indietro. (vedere Risorse: Sketch Arduino, Arduino Programming).
Come capisco che il moto armonico è la proiezione di un moto circolare lungo un diametro?

PASSO 5
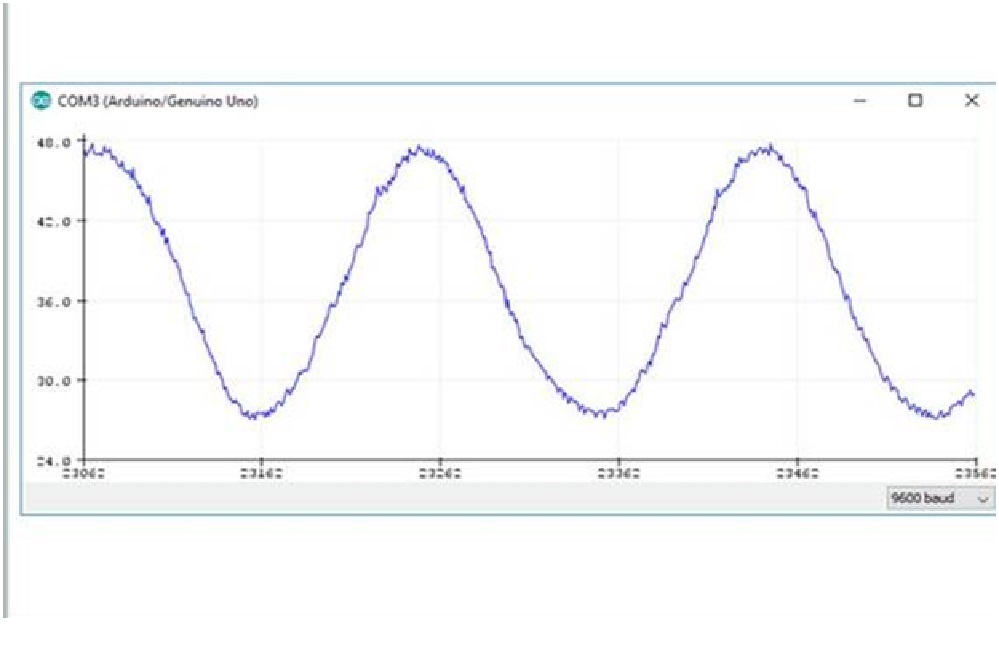
Mentre la manovella gira muovendosi di moto circolare uniforme, sul plotter seriale si visualizza la variazione nel tempo della distanza percorsa dal segnale sonoro emesso dal sensore posto sulla manovella, verificandone l’andamento sinusoidale.
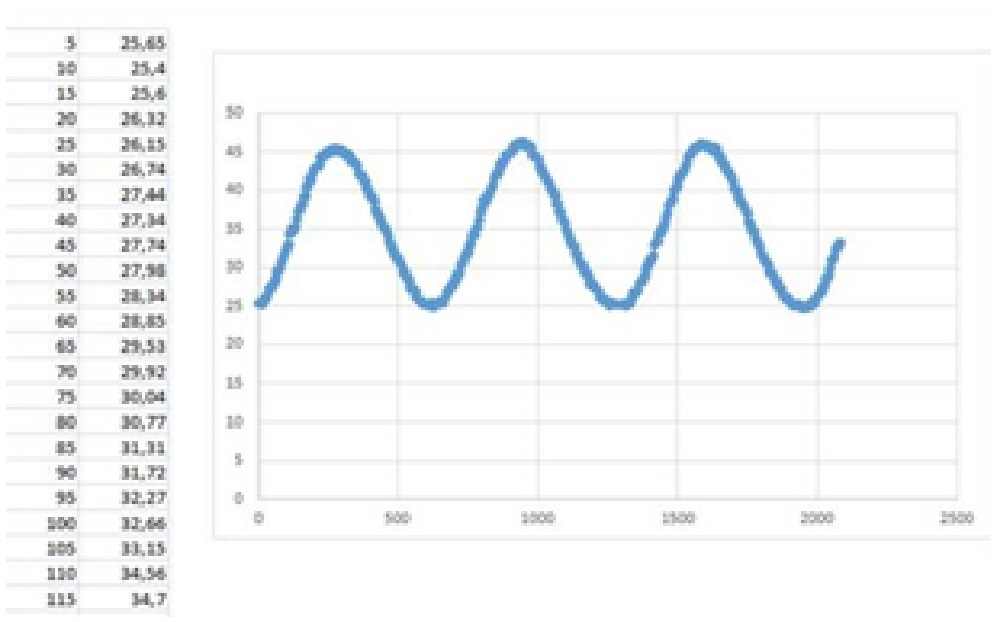
PASSO 6: i dati sperimentali
I dati registrati possono essere riportati su un file excel: il grafico che vediamo verifica l’andamento sinusoidale atteso.
Ma la sinusoide riprodotta nel video ha una “coda” (o sbavatura) verticale…
A cosa è dovuta?

PASSO 7: il rumore
La “coda” è un “rumore”, ovvero, un disturbo della nostra misura.
Questo “rumore” può essere ridotto evitando che la manovella tocchi nel suo punto più basso il piano orizzontale. Per migliorare la misura conviene quindi rialzare il macinino da terra e ripetere le misure.
Altra causa di “rumore” potrebbe essere la riflessione delle onde sonore sul piano di appoggio orizzontale: ciò si può verificare qualora il sensore non mantenga la sua corretta posizione parallela al piano.
Con tali accortezze puoi ridurre al minimo il rumore e ottenere una sinusoide più pulita.

Variando la velocità di rotazione v della manovella si può verificare che varia anche il periodo T dell’onda.
Variando la distanza del macinino dallo schermo si può verificare che l’ampiezza dell’onda (lunghezza della manovella) non varia. Ciò che si osserva è unicamente un “innalzamento” della sinusoide rispetto all’asse delle ascisse dovuto alla maggior distanza percorsa dal segnale sonoro.

Commenti